This project is taken from and is an extention of my master's dissertation which can be found
here
Simulation and Linear Quadratic Guassian Control of Y-6 UAV
The purpose of designing and implementing control systems is to reject or minimise the effects
of disturbance on systems, as well as change the characteristics of the system to meet
performance requirements. Therefore in order to accomplish this with the UAV,
LQG, LQ-MPC and PID control systems will be developed and the following
themes will be explored:
Discretization
Analysis
LQG
LQ-MPC
PID
Discretization
The Linearised model obtained is derived in previous section is in the continuous-time domain.
However, to design control systems which can be implemented unto digital computers, the control laws must
be in the discrete-time domain. This can be done either by designing the control systems in the
continuous-time domain then converting the resulting continuous control laws into discrete ones,
or by transforming the entire continuous-time model to the discrete-time domain then designing
the control laws using the discrete-time system model. This project utilises the latter method.
To convert a continuous-time state space model of form:
and T is the discretization sample time, k is the time increment, and I an identity matrix of sufficient
dimension.
Analysis
Stability
Stability theory plays a key role in the design of control systems. There are different kinds of stability
problems that arise in the study of dynamical systems. The stability of systems about equilibrium
operating points is usually characterised in the Lyapunov sense where an equilibrium point is said
to be stable if all solutions starting nearby the equilibrium points stay nearby for all time,
otherwise the system is said to be unstable.
This definition of stability can be further specified to define stability in the asymptotic sense,
where a system is said to be asymptotically stable if all solutions starting nearby the equilibrium
points not only stay nearby, but also tend to the equilibrium point as time goes to infinity.
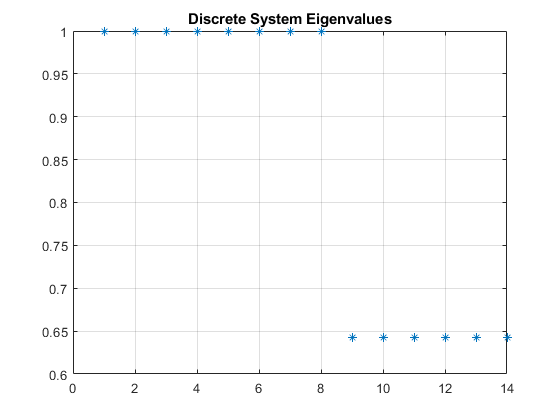
For linear state-space systems, stability can be assertained from the locations of the eigenvalues,
\( \lambda \), of the \( A_{dt} \) matrix, This process is know as Lyapunov's indirect method.
A look at the systems eigen values reveals the presence 6 eigenvalues with a value less than 1,
and 8 eigenvalues with a value of 1. For discrete-time systems, stability can be said to be asymptotic
if all eigenvalues are strictly within the unit circle, Lyapunov if all eigenvalues are within or on the
unit circle, and unstable otherwise. Therefore the linear systems model can be said to be stable in the
sense of Lyapunov. This implies also that the non-linear systems model is locally stable in the sense of
Lyapunov about the equilibrium points \( X_e \).
However due to real world disturbances such as model uncertainty, sensor noise and external wind disturbances,
the system will not remain at the point of equilibrium save for the intervention of some control law to reject
the effect of these disturbances. Hence, the system, although statically stable, is dynamically unstable.
Reachability
Reachability is a property which is determined by coupling between the inputs and the system states, a system is
said to be reachable if for any initial set of state values \( X_0 \), and any final set of state values, \( X_f \),
there is a control signal \(\mu(k)\) that can take the system from \( X_0 \) at k = 0, to \( X_f \) within some
finite time. A system is said to be reachable if the reachability matrix is full rank equalling the number of
state, n:
Thus, as the rank of \(W_r\) is equals to n, the system can be
said to be reachable. The less stringent property of stabilisability can also be defined where only the
unstable states need be reachable.
Observability
Observability is a property which is also determined by coupling, in this case, between the system outputs
and states. Therefore the system outputs, \(Y\), must be defined where \(Y\) is a subset of the
state \(X\).
\begin{equation}
Y = [z,\phi,\theta,\psi]
\end{equation}
A system is said to observable if for all time, it is possible to, from a limited set of state measurements
\(Y(k)\), and knowledge of the inputs \(\mu(k)\), uniquely obtain the full state, X(k). A system is said to be
observable if the observability matrix is full rank equalling n:
As with reachability, a less stringent property, detectability, can also be defined where
only the unstable states need be observable.
Interestingly, for this combination of \( A_{dt} \) and \( C_{dt} \), it is found that
\( W_0 \) is not full rank, and therefore the system in its current form is not observable. Upon
further analysis, it is discovered that this is as a result of the Coaxial propulsion unit configuration,
as there are numerous combinations of thrust force values that each individual propulsion unit can generate
which produce the same resultant torque about the centre of mass making it impossible to obtain a unique full
state. One possible solution is to modify the UAV design to include RPM sensors to measure at least 2 non-coaxial motors. However,
in the upcoming LQG subsection, a more elegant solution is proposed.
Linear Quadratic Gaussian Control (LQG)
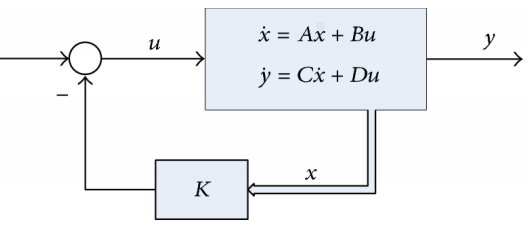
Full State Feedback
Full-state feedback is a control technique which makes use of the full-state, \( X(k) \) of a system,
to modify the system's eigenvalue so as to change its characteristic responses. This is
done by determining some set of gains K which when applied to the system states, the resultant
of which being fed back into the system as inputs, adjust the dynamics of the system, where:
LQR is a technique for finding the set of gains K, in a manner which is in some wise optimal.
In order to accomplish this, LQR seeks to find a control sequence \( \mu \) to minimise
a quadratic cost function by formulating the control problem as optimisation problem \(P_\infty(X(0))\),
where:
Where \(Q^{n \times n}\), and \(R^{m \times m}\), are 2-norm weighing matrices on the states and inputs respectively.
These weight are selected via trial and error. Such an optimisation over an infinite horizon, as \(k \to \infty \), would be intractable, however through the
application of the Dynamic Programming (DP) formulated from Bellman's principle of optimality, the solution
emerges as a result of the derivation of a set of Discrete Algebraic Riccati Equation (DARE) where:
In order for the optimisation problem to be feasible, certain criteria must be satisfied:
Q be at least Positive Semi-definite (P.S.D) and R be strictly Positive Definite (P.D).
\( (A_{dt},B_{dt}) \) must be at least stabilisable.
\( (C_{dt},A_{dt}) \) must be at least detectable.
Reference Tracking
The control problem as set up in the previous LQR subsection is one capable of realising
a control system with the goal of driving all system states to the equilibrium points.
However, in order for the control system to be usefully implemented on a UAV, it must be
able to track and set the system outputs Y to, a desired reference target, r,
preferably with no errors asymptotically. Therefore, to accomplish this, the system's model must be
augmented to include behaviour which seeks to minimise errors between a reference target and UAV output,
this is done through the addition of integration states. hence:
\begin{equation}
X_{aug} =
\begin{bmatrix}
X \\
X_I
\end{bmatrix}
\end{equation}
Where 0 is a square zeros matrix of dimension P and I is an identity matrix of dimension p.
Solving the LQR optimisation problem with, \(A_{aug}\),\(B_{aug}\),\(C_{aug}\) and \(Q^{n+p \times n+p}\),
given this augmented system, produces a control law:
\begin{equation}
\mu(k) = - K X(k) + K_I X_I(k)
\end{equation}
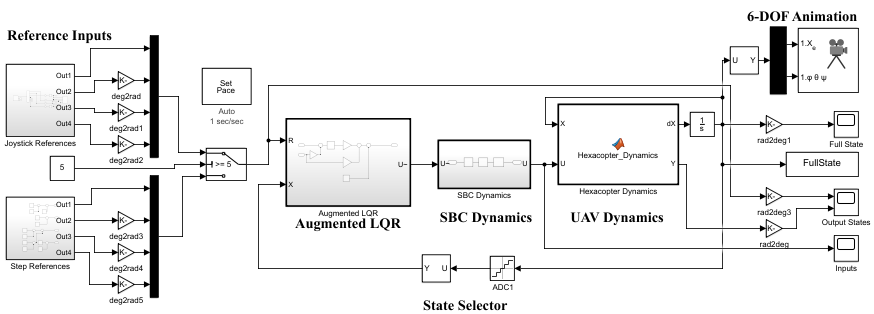
This is implemented in the MATLAB-Simulink environment while taking into account the SBC dynamics
such the effects of quantisation from digital to analog and visa-versa conversions which are always
present when digital controllers interface with real analog continuous-time systems.
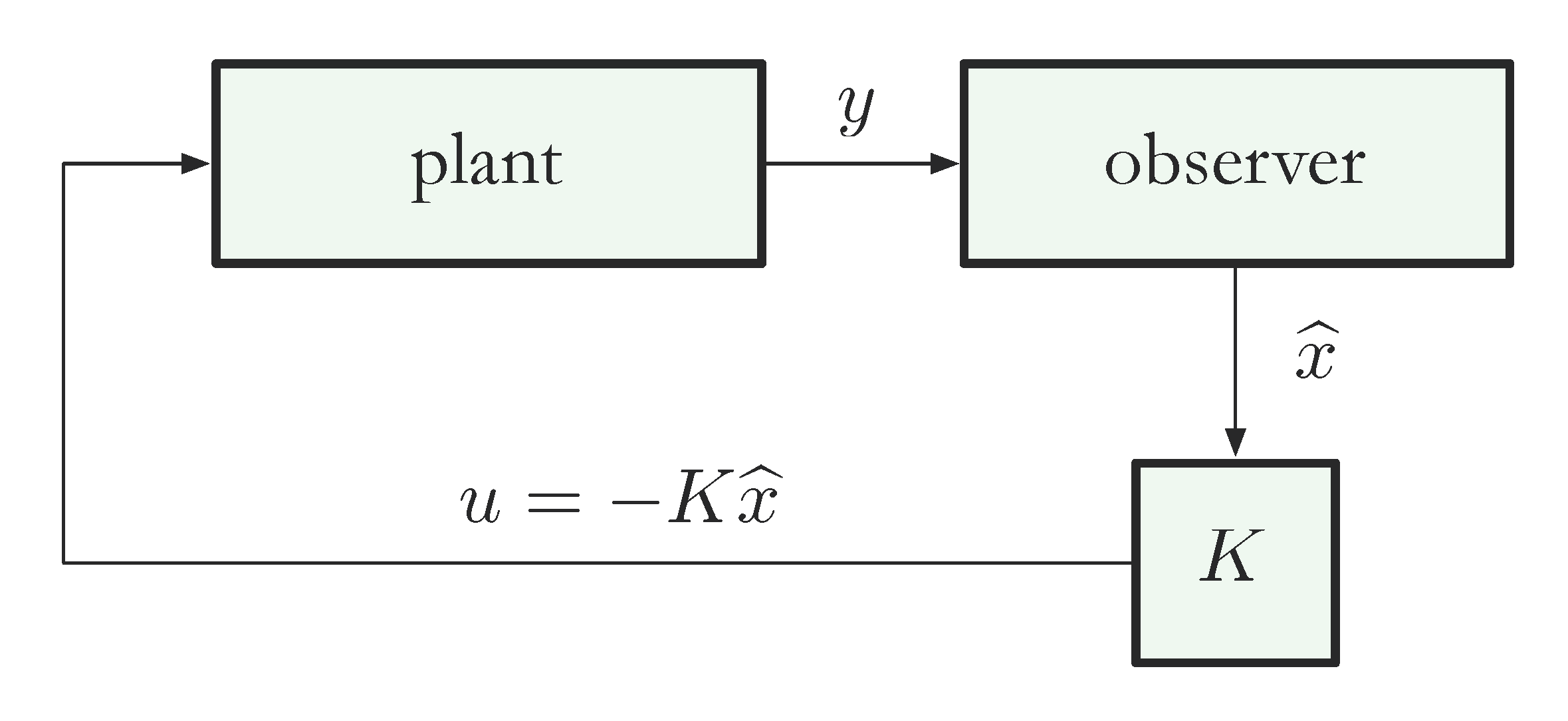
State Estimation
The control law devised in LQR subsection was produced under the assumption that the full state of
the system, X, is available for full-state feedback, however, this is not the case as only a limited
number of state measurements are available and these form the measured outputs, Y. Therefore, in order
to utilise a full-state feedback control law, the full-state of the system must be estimated from these
limited measurements present. This is performed through the implementation of a State Observer/Estimator.
State estimators accomplish this by applying knowledge of the system dynamics through the utilisation of
the system's model and its observability property. The estimator mimics the system dynamics giving:
\[
\hat{X}(k+1) = A_{dt}\hat{X} + B_{dt} \mu(k) + L e
\]
\begin{equation}
\hat{Y}(k) = C_{dt}\hat{X}
\end{equation}
where \(\hat{X}\) and \(\hat{Y}\) are the estimated system states and outputs, L is the estimator gain with e
being the output error, which is the difference between the estimator model and the system outputs.
\[
e = Y - \hat{Y}
\]
As with the system's model, the behaviour of estimator model and thus the quality of the estimation is
determined by the state estimation error dynamics, where:
with implementation of the observer gain L, the closed-loop estimator dynamics are give by:
\begin{equation}
\hat{X_e}(k+1) = (A_{dt} - L C_{dt})\hat{X_e}
\end{equation}
If the eigenvalues of the estimator exist outside the unit circle, then the estimator is unstable
and the state estimation is be divergent, and if the system is observable, then it is always possible
to derive some gain L, to produce any set of desired eigenvalues.
In the earlier observability subsection, it was found that the system is not observable due to propulsion
unit configuration, and the emergent thrust and torque combinations making the estimation of a unique full
state impossible. This can be rectified simply be making the system observable by modifying the hardware
and measuring the value of some of the motor states via RPM sensors. However, there is another way this can
be solved without the need to obtain additional sensors, that is, by virtually augmenting the output, Y to
include terms for at least 2 out-group non coaxial motor pairs, then returning an error vector, e, where the error value
for those 2 motors is 0, therefore:
This augmentation has the effect of using the model to completely determine the value of the motor angular
velocity by assuming the model is a perfect representation of the actual system. This augmentation is done
solely for the purpose of state estimation so there are still only 4 reference input to the controller and
only 4 measured outputs, but with this, the system is now fully observable.
Kalmam Filter
Kalman Filtering encompasses a series of techniques with a wider range of applications one such application is
for obtaining an estimator gain L, which is in some wise optimal. This is accomplished by constructing an optimisation
problem with the objective of minimising a set of noise measurement covariances which arise from disturbances to the
system such those due to model uncertainty and noise present in the output sensor readings, these sources of noise are
modelled as Gaussian noise distributions. Thus, when used in combination with the LQR, the combination is called the
Linear Quadratic Gaussian. The Kalman Filter problem is a corollary problem to the LQR, where optimisation is also
performed over infinite horizon, requiring the application of DP, and is thus derived resulting in another DARE.
There are 2 major implementations of the Kalman filter which are popularly employed:
The Linear Kalman Filter (LKF)
The Extended Kalman Filter (EKF)
The process described above only fully pertains to the design of an LKF. The EKF is used in estimating the
states of non-linear systems, utilising the non-linear system model directly but then implementing an online
lineariser that linearises the system at each time interval, k, to produce a linear model which is then used
to solve for the estimator gain L as stated above. There is another kalman filter implementation known as
the Unscented Kalman Filter (UKF), which utilised a different linearisation technigue to the EKF, but that
isnt considered here. Through experimentation with the estimator model, it was found that the systems states
could be estimated by modifying the LKF to use the non linear model derived in chapter 3, similar to the EKF.
This modified LKF would then use the linear model to derive the estimator gain L and the full state estimations
would be derived from applying this gain to the discretised non-linear model.
This is possible due to the limited operational scope where the system is not expected to deviate far enough
from the equilibrium operating points about which the non-linear model was linearised as presented in the post
on modelling. Therefore this method could be called a Limited EKF of sorts without the online linearisation.
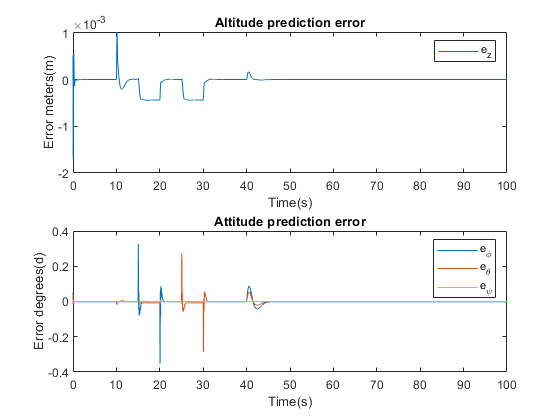
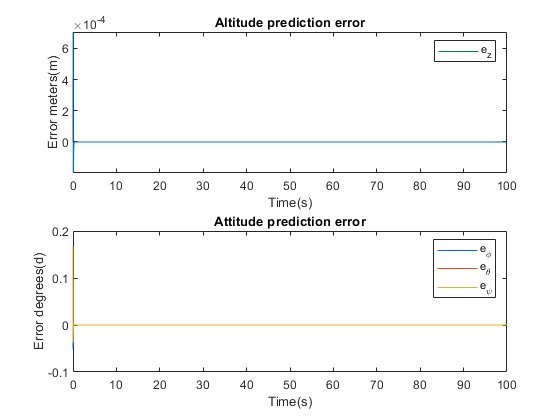
This Limited EKF modification results in more accurate state and output predictions than the standard LKF
implementation, as shown when the errors between the non-linear model outputs and estimator outputs are compared.
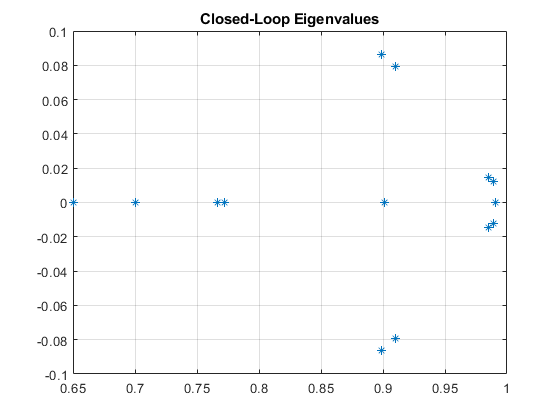
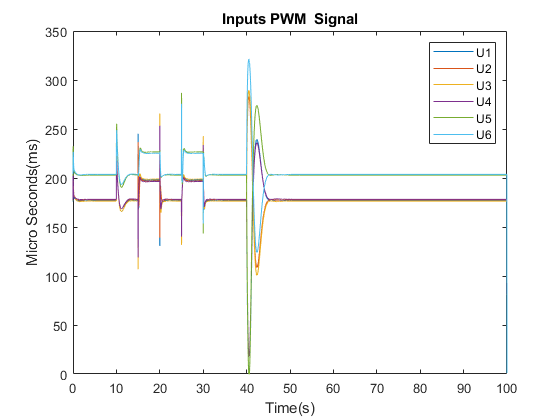
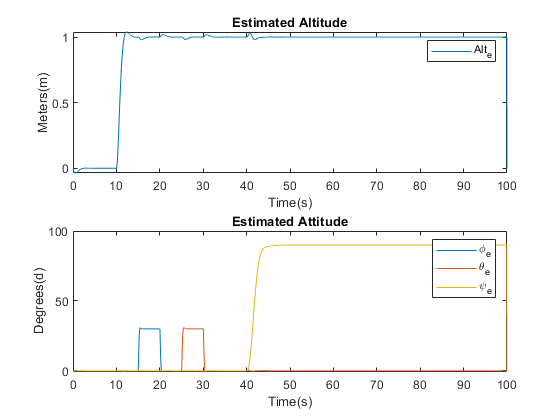
LQG Results
After Implementation of the LQG controller, all the closed-loop system eigenvalues are now within the unit
circle, thus stabilising the system. Response plots of the system inputs, and the estimated, with Limited
EKF, outputs of the system when subjected to reference step inputs are shown as the simulation is run over an interval
of 100 seconds.