This project is taken from and is an extention of my master's dissertation which can be found
here
Mathematical Modelling of Y-6 UAV
Mathematical models are used to describes the characteristics of physical systems. They are
derived from assumptions made about the system which are represented abstractly. In modelling systems,
it is necessary to state all assumptions made which allows for a mapping of a multirotor's movements
and behaviour with the respect to its inputs and any external influences thus deriving a series of
functions that map inputs onto outputs while determining all the important time dependant elements
of the system. In order to successfully accomplish the development of an appropriate mathematical
model for both simulation and control design, the following topics will be explored:
Kinematics
Kinetics
Actuator Dynamics
Linearisation
Multirotors can be defined as rigid-bodies free to move in 3-D space with
Six Degree of Freedom, 6-DOF, with all motion restricted to being either rotational or translational.
This project will derive and present 2 models, a non-linear model utilised in simulation, and a Linear
model utilised in analysis and control design.
Kinematics
Multirotor mathematical models have to describe attitude and position according to the geometry of the UAV.
one of the most important parts of multirotor modelling is understanding the geometric kinematic relationships
between the reference frames. Kinematics is the study of motion in terms of positions and velocities without
regard to the forces causing the motion. Multirotor motion can be described by a number of variables called
states, that are related and change with suitably chosen axes systems or reference frames. These reference
frames are:
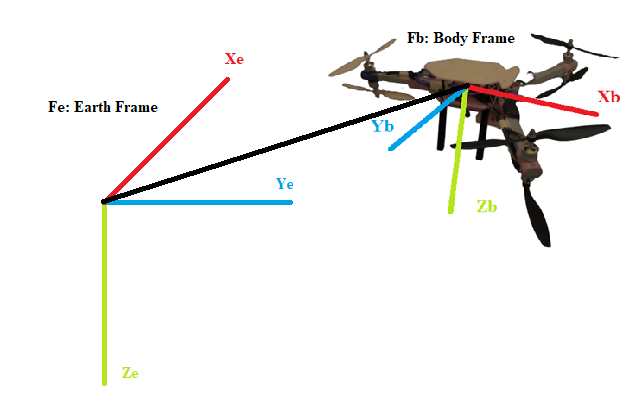
The Earth Frame: Fe
The Body Frame: Fb
Each frame consists of 3 orthogonal axes, Xe,Ye,Ze and Xb,Yb,Zb respectively, about and
along which rotational and translational motion respectively occurs. Fe is fixed to
the earth near the multirotor, and Fb is attached to the vehicle centred at the UAV’s centre
of mass. The usual convention for the axes representation is to have an axes system with the
positive Z axes pointing downwards towards the earth when level, the positive X axis pointing
forward and the positive y axis pointing towards the right. This convention is referred to as
the NORTH-EAST-DOWN Right-handed coordinate system.
we define state vectors:
i
\begin{equation}
\vec{El} =
\begin{bmatrix}
x \\
y \\
z
\end{bmatrix}
\end{equation}
iii
\begin{equation}
\vec{Bl} =
\begin{bmatrix}
u \\
v \\
w
\end{bmatrix}
\end{equation}
iv
\begin{equation}
\vec{Br} =
\begin{bmatrix}
p \\
q \\
r
\end{bmatrix}
\end{equation}
i Represents the linear positions of Fb’s centre with respect to (w.r.t) Fe.
ii Represents the angular rotation of Fb about all 3 axes, w.r.t Fe.(roll, pitch, yaw)
iii Represents the linear velocity in each Fb axis.
iv Represents the angular velocity in each Fb axis.
Using the \(\phi, \theta, \psi\) representation, the rotational motions of Fb w.r.t Fe can be
derived by looking at rotations about each axis individually. any arbitrary rotation and
orientation in 3-D Euclidean space can be represented in this manner. These elemental rotation
angles are known as Euler angles where rotations are represented as direction cosine matrices,
These are:
These elemental rotations can by combined via the ZYX convention to produce a matrix,
the inverse of which, R, is able to map the linear velocities and accelerations in Fb to
linear velocities and accelerations with respect to Fe given any set of arbitrary
\(\phi, \theta, \psi\) values.
Similarly, to map the angular velocities and accelerations in Fb w.r.t
Fe requires another transformation matrix, the inverse of which, T, is
also derived from the manipulation of Euler angles.
Where S, C, T, represent Sin, Cosine and Tan respectively.
Kinetics
Kinetics is the study of motion considering the forces and torques which cause the motion.
As stated in the previous UAV subsection, this project looks at a Y6 hexarotor UAV
which possesses 6 BLDC motors with propellers in a coaxial motor layout. Each motor propeller
unit, or propulsion unit, produces a thrust force, the collective effect of which can be summed
and lumped together as a single force F, where n denotes the motor index,. Each propulsion unit,
also produces a reaction torque. When a motor turns, in overcoming air resistance, a reactive
force acts on the propeller in the direction opposite to the motor's rotation which produce a torque
acting on the UAV body. These torques, \(\tau\), can then also be summed together, meaning:
\[\sum_{n = 1}^{n = 6}F_n\]
\[\sum_{n = 1}^{n = 6}\tau_n\]
The co-axial configuration also ensures single point torque balancing, meaning so long as all rotors
pair each produce the same torque, the net reactive torque produced is zero. The translational and
angular motion of the Y6 hexarotor is controlled by thrust forces and torques produced by each motor.
The main thrust is the sum of all rotors thrust, and rotational movement is generated by differences
in individual motor thrusts and torques. The Multirotor 6-DOF rigid body kinetics takes into account
the mass, and the inertia of the body. These are described by differential equations, which are derived
through the utilization of the Newton-Euler modelling convention which derives representations of systems
dynamics through the application of first principles via newtons 2nd law of motion aggregating all forces
and torques applied to the rigid body by its actuators and environment while observing the resultant
accelerations produced. Resolving the Forces acting linearly on the UAV produces:
where M is mass, g is acceleration due to gravity acting in the vertical
Ze axis plane, \(D_l\) is a diagonal matrix of drag coefficients with
aerodynamic drag acting directly proportional to velocity in the Fe frame,
A is the vector of torques generated by the sum of motor forces and torques
in each axis, C is the Corriolis matrix formed of the cross product between
the angular velocity vector and the diagonal inertia Tensor I, and \(D_r\)
is the diagonal matrix of drag coefficients acting against motion in each axis.
Where L is the perpendicular distance from each motor group to the centre of mass.
Asymmetry
Due to the asymmetry of the Y6 hexarotor, mass is not even distributed across the UAV frame.
This creates a particular imbalance of inertia about the centre of mass, which is the centre
of all rotation in Fb. This leads to a case where I has off diagonal elements. i.e:
This creates a situation whereby Fb, is inaccurate and instead,
is transposed to some other orientation, meaning rotation about the centre mass will
occur in an oblong manner. To correct this, it is possible to adjust the inertia tensor
by deriving some diagonalising operation such as performing an Eigenvector decomposition,
this transformation will then need to be applied to all inertia dependant terms in the angular
motion calculation. However, for the purpose of this project, it is possible to operate under
the assumption that the system is symmetrical, as presented by a purely diagonal inertial tensor.
This is due to the off-diagonal terms in the inertia matrix being far lower in magnitude than the
diagonal terms themselves, meaning that the transposed reference frame does not differ too significantly
from assumed symmetrical axes, thus any deviations can be reasonably neglected.
Actuator Dynamics
The thrust forces and torques acting on the multirotor UAV are primarily generated by propulsion units
consisting of a BLDC motor, an ECS and propeller. In order to produce a useful and fully developed systems
model, the characteristics of the propulsion units must be known. This can either be done via first principles
analysis looking at the mechanical, electrical and aerodynamic properties of each individual component, before
calculating and then applying the results together in series to produce a high order high fidelity model.
However taking this approach in many cases is unnecessary. This is due to being able to derive a lumped
parameter model, which views the sum total of all the individual components as a single system with singular
dynamics. Therefore, using system response analysis and computational methods such as data fitting, it is possible via
experimental systems identification to generate a lower order, minimum realisation model of sufficient fidelity.
The systems identification approach involves the derivation of lumped parameter linear input-output models,
between input PWM signal widths and the output angular velocity, torque and thrust forces respectively using
a motor test stand, which consists of a load cell, for measuring forces and torques as well as an electronic
revolutions per minute (RPM) sensor.
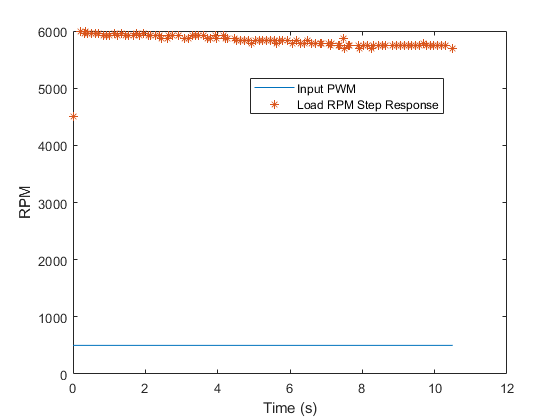
Using the Test stand, input-output PWM to RPM data is collected. the response of a propulsion unit to a step
input of 500\(\mu s\). This data was then passed through the MATLAB systems identification application where,
in order to account for potential delays in the input response and produce a simple model, a first order
transfer function was fit to the data, this transfer function can then be reformulated into a differential
equation:
Where, \(K_u\), is motor gain, \(\tau_m\) is the response time constant, \(\mu_n\) is the input PWM
signal width and \(\omega_n\) is the angular velocity. The response of the identified model to the same
step of 500\(\mu s\).It is important to note that due to filtration present in the ESCs, the response
time constant is sensitive to the frequency of the input PWM signal, therefore, throughout the investigation
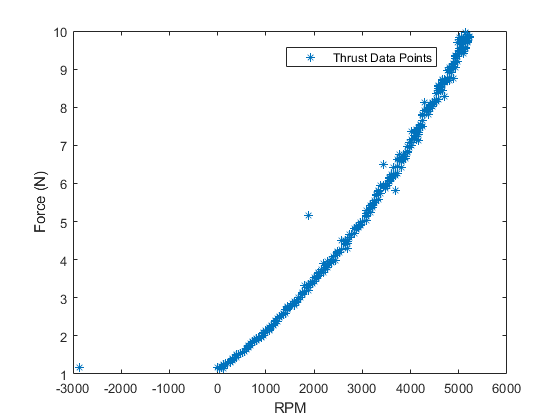
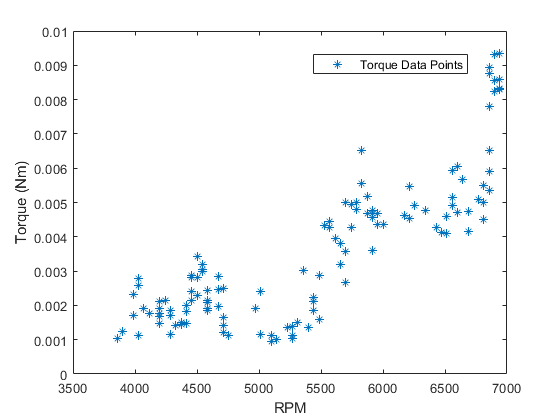
a frequency of 400 Hz is maintained. Similarly, using the test stand, data displaying the relationship
between the force and torque produced by the propulsion unit against generated angular velocity is shown.
2 quadratic models of the form:
respectively are then fit to the data where \(\omega\) is the angular velocity of the motor, \(K_a\),
\(K_b\) and \(K_\tau\) are the force and torque coefficients respectively derived from the quadratic models.
Due to the complex aerodynamic interactions from the overlapping air flow between the coaxial pairs,
the actual thrust force produced is lower than would be expected from the sum of the two propulsion
units. This loss is represented by a gain \(K_w\) that is less than 1 and applied to all odd indexed
propulsion units.
Non-Linear Model
Collating all the derived models process presents the following non-linear mathematical model
describing the dynamics of the Y6 hexarotor UAV. which will be used to produce simulations of the
system in MATLAB/Simulink.
As with the UAV dynamics, the majority of real world systems are non-linear. However, the majority
of techniques developed in control theory have been developed for application to and analysis of
linear systems. Therefore in order to utilise these techniques it is pertinent to devise some means,
of operating with Non-linear systems as if they were linear. one means of accomplishing this is through the application of the Jacobian process linearisation
about specific operating or equilibrium points. First however, several assumptions need to be made
to reduce the model complexity making it more amicable to linearisation.
The UAV is operating in stationary hover conditions
Multiplying out the matrices and collecting terms produces 6 distinct 2nd order non-linear
Differential, and 1 linear differential equation representing the dynamics of each motor:
$$
X =
\begin{bmatrix}
x,\dot{x},y,\dot{y},z,\dot{z},\phi,\dot{\phi},\theta,\dot{\theta},\psi,\dot{\psi},\omega_1,\omega_2,\omega_3,\omega_4,\omega_5,\omega_6
\end{bmatrix}
$$
However for the purposes of this project the full state isn't utilised as feedback control authority
in x and y are not required to maintain a stable hover. therefore, a reduced state can be defined:
$$
X =
\begin{bmatrix}
z,\dot{z},\phi,\dot{\phi},\theta,\dot{\theta},\psi,\dot{\psi},\omega_1,\omega_2,\omega_3,\omega_4,\omega_5,\omega_6
\end{bmatrix}
$$
In order to linearise the system equations, equilibrium points must be defined. These are the set of
states and input values for which the system is stationary i.e:
\[\dot{X} = f(X_e,\mu_e) = 0\]
where f represents the systems dynamics,therefore, the following equilibrium input and state vectors can
be defined:
These differential equations approximately govern the deviation variables, and as long as they remain small,
this presents a linear, time-invariant, differential equation, as the derivatives of \(\bar{X}\) are now linear
combinations of the deviation states and the deviation inputs, \(\bar{\mu}\). Finally, the Linear Continuous-Time State-Space model emerges following:
\begin{equation}
A = \frac{\partial f}{\partial X}\bigg\vert_{\mu = \mu_e}^{X = X_e}, \in R ^{n\times n}
\end{equation}
\begin{equation}
B = \frac{\partial f}{\partial \mu}\bigg\vert_{\mu = \mu_e}^{X = X_e} , \in R ^{n\times m}
\end{equation}
Where n is the number of states, m the number of inputs, A the n-by-n dynamics matrix and B the n-by-m
input matrix.